
Bouwen
Bij het bouwen van een rijdende robot op basis van een Arduino Uno gaan we uit van een robot die niet botst. De robot rijdt  rechtdoor totdat hij dicht bij een voorwerp komt. Dan maakt hij een bochtje achteruit. De afstand kan gemeten worden met een ultrasone sensor. Deze sensor is te vergelijken met de oren van een vleermuis: een onhoorbaar signaal wordt uitgezonden, weerkaatst en weer opgevangen. Door verschil in tijd tussen uitzenden en ontvangen kan de afstand bepaald worden.
rechtdoor totdat hij dicht bij een voorwerp komt. Dan maakt hij een bochtje achteruit. De afstand kan gemeten worden met een ultrasone sensor. Deze sensor is te vergelijken met de oren van een vleermuis: een onhoorbaar signaal wordt uitgezonden, weerkaatst en weer opgevangen. Door verschil in tijd tussen uitzenden en ontvangen kan de afstand bepaald worden.
rechtdoor totdat hij dicht bij een voorwerp komt. Dan maakt hij een bochtje achteruit. De afstand kan gemeten worden met een ultrasone sensor. Deze sensor is te vergelijken met de oren van een vleermuis: een onhoorbaar signaal wordt uitgezonden, weerkaatst en weer opgevangen. Door verschil in tijd tussen uitzenden en ontvangen kan de afstand bepaald worden.
De wielen worden door motortjes via een overbrenging (gearbox). Die kan je zelf maken of kant-en-klaar kopen.
Uitleg en voorbeeld van de motoraansturing (m.b.v. IC L293D) is te vinden op hardwarefun.com.
Voor de ultrasone sensor (HC-SR04) is dit te vinden op HWC Ontwerpen.
Door de beide ideeen op de juiste manier te combineren kan je een robot bouwen.
In de plaatjes staat een voorbeeld van zo'n robot. 
Veel van de onderdelen kunnen in Nederland bijvoorbeeld bij de hackerstore gekocht worden. Ook kunnen deze onderdelen in China via AliExpress gekocht worden (lage prijzen en langere levertijd). Platte batterijen zijn o.a.bij Opitec te koop. Voortschrijdend inzicht heeft geleerd dat de robot het iets beter doet met 6 V in plaats van 4,5 V. Batterijhouders voor 4x AA (4x 1,5 V) zijn ook te koop bij AliExpress of zelf met een 3D-printer te maken (https://www.thingiverse.com/thing:456900). Foamboard is
te koop bij foamboarden.nl, maar je kunt  natuurlijk ook stevig karton gebruiken. De verbindingen zijn geklemd of gelijmd met lijmpistool en/of dubbelzijdig plakband (bijv. Action) gemaakt worden. Ook de 9V-batterijen zijn bij de Action te koop. Indien het materiaal gunstig ingekocht wordt, kan zo'n robot voor een 20 euro gebouwd worden.
natuurlijk ook stevig karton gebruiken. De verbindingen zijn geklemd of gelijmd met lijmpistool en/of dubbelzijdig plakband (bijv. Action) gemaakt worden. Ook de 9V-batterijen zijn bij de Action te koop. Indien het materiaal gunstig ingekocht wordt, kan zo'n robot voor een 20 euro gebouwd worden.
natuurlijk ook stevig karton gebruiken. De verbindingen zijn geklemd of gelijmd met lijmpistool en/of dubbelzijdig plakband (bijv. Action) gemaakt worden. Ook de 9V-batterijen zijn bij de Action te koop. Indien het materiaal gunstig ingekocht wordt, kan zo'n robot voor een 20 euro gebouwd worden.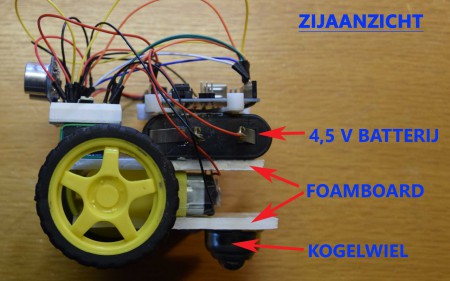 Uiteraard zou ook een aan andere robots gedacht kunnen worden, zoals een lijnvolgende robot. Aan de onderkant zendt een LED licht uit. Dit wordt opgevangen door een LDR. De LDR meet de lichtsterkte. Is de reflecterende lichtsterkte groot, dan is de ondergrond wit (of een lichte kleur). Is de reflecterende lichtsterkte klein, dan is de ondergrond donker (of zwart). Of deze manier kan de robot geleerd worden om een lijn te volgen.
Uiteraard zou ook een aan andere robots gedacht kunnen worden, zoals een lijnvolgende robot. Aan de onderkant zendt een LED licht uit. Dit wordt opgevangen door een LDR. De LDR meet de lichtsterkte. Is de reflecterende lichtsterkte groot, dan is de ondergrond wit (of een lichte kleur). Is de reflecterende lichtsterkte klein, dan is de ondergrond donker (of zwart). Of deze manier kan de robot geleerd worden om een lijn te volgen.
In het submenu links nog wat handige tips voor het maken van een lichtsensor, een tastsensor en van stekkertjes.
In bijgaande bestand de aanvullende benodigdheden voor deze robot.
Mocht het zelf samenstellen van de sketch en de schakeling echt niet lukken, dan is hier een PDF-bestand met een mogelijke uitwerking. En hier vind je een Word-bestand met de Sketch voor het eindproduct.
VEEL SUCCES!